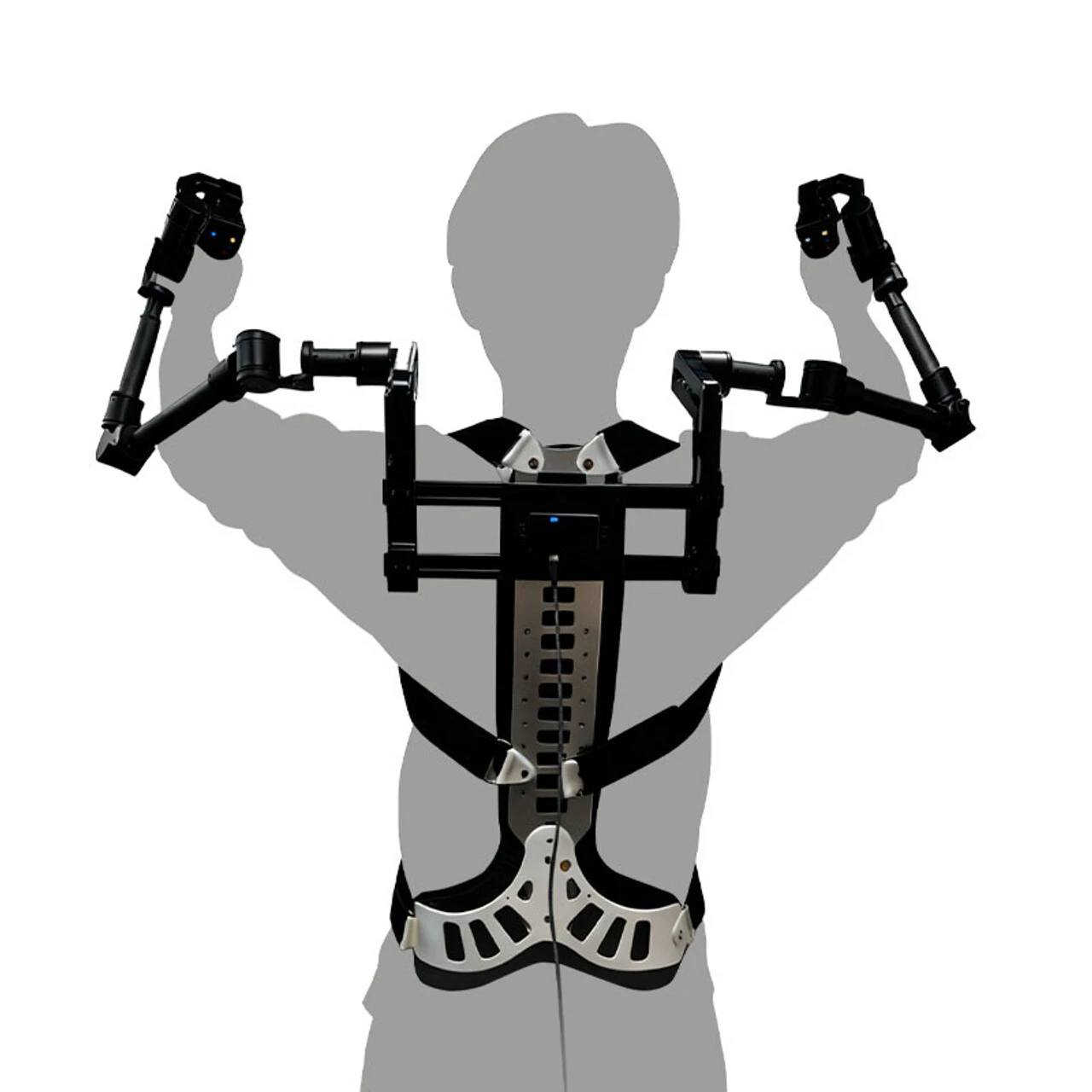
착용형 외골격 - 로봇 팔 및 VLA 애플리케이션을 위한 원격 조작, OpenArm ExoArm-7과 호환
OpenArm과 호환
14 DOF 듀얼 암 디자인
< 20ms 초저 지연 시간
맞춤형 핏을 위한 조절 가능한 팔 길이
정밀 추적을 위한 14비트 절대 인코더
SDK 포함 – 간편한 통합 및 제어
외골격 원격 조작 팔은 MIT와 같은 유수 기관에서 수행하는 휴머노이드 로봇 공학 및 원격 조작 분야의 최첨단 연구에서 영감을 얻었습니다.
웨어러블 외골격 원격 조작 팔로 직관적인 로봇 제어의 잠재력을 발휘해 보세요. 원활한 데이터 수집과 원격 조작을 위해 설계된 이 경량의 인체공학적 시스템은 모든 팔 움직임을 초저지연(20ms 미만)으로 로봇 팔에 직접 매핑하여 부드럽고 자연스러우며 반응성이 뛰어난 제어를 제공합니다.
이 시스템은 고품질 원격 조작 데이터 수집을 위해 로봇 팔과 결합하여 사용할 수 있으며, 향후 VLA 및 로봇 학습 애플리케이션에 유용한 인간 시연 데이터 세트를 제공합니다.
기능 및 용도:
• 원격 조작: 착용형 외골격을 통해 로봇 팔을 제어합니다.
• 데이터 수집 및 동작 분석: AI 훈련, 학습 및 로봇 개발을 위해 정확한 인간 동작 데이터를 수집합니다.
• 과학 및 교육적 용도: 연구 실험, 교육 및 로봇 공학 과정에서 상호 작용 제어에 사용됩니다.
주요 특징:
• 고정밀 모션 캡처: 14비트 단일 회전 절대 엔코더는 안정적인 위치 피드백과 정밀한 추적을 보장합니다.
• 자연스럽고 직관적인 조작: 각 팔은 7자유도(총 14자유도)를 제공하여 유연하고 실감나는 조작이 가능합니다.
• 경량 및 인체공학적 디자인: 편안하고 장시간 착용하기 쉬우며, 자연스러운 인체 움직임에 맞춰 설계되었습니다.
• 신속한 대응: 움직임의 즉각적인 전송으로 실시간 원격 조작이 가능합니다.
• 폭넓은 호환성: OpenArm을 포함한 다양한 로봇 팔 모델을 지원하며, 빠른 통합을 위한 SDK를 제공합니다.
사용 사례:
데이터 수집 및 동작 분석
모방 학습, 강화 학습을 위해 정확한 인간 동작 데이터를 수집하여 미래의 가상 학습 분석(VLA) 및 로봇 학습 애플리케이션에 유용한 인간 동작 시연 데이터 세트를 제공합니다.
과학적 및 교육적 용도
연구실, 대학 및 로봇 공학 강좌에 적합하며, 인간-로봇 실험을 위한 직접적인 상호 작용 및 제어 기능을 제공합니다.
사용 사례 확장:
가상 현실(VR) 및 증강 현실(AR): 몰입형 제어 및 시뮬레이션을 위해 VR/AR 시스템에 통합될 수 있습니다.
구매하신 상품에는 다음이 포함됩니다:
엑소암-7 외골격 웨어러블 로봇 팔 컨트롤러 1개