Foxtech proporciona soluciones de drones industriales & Sistemas de carga útil de UAV.













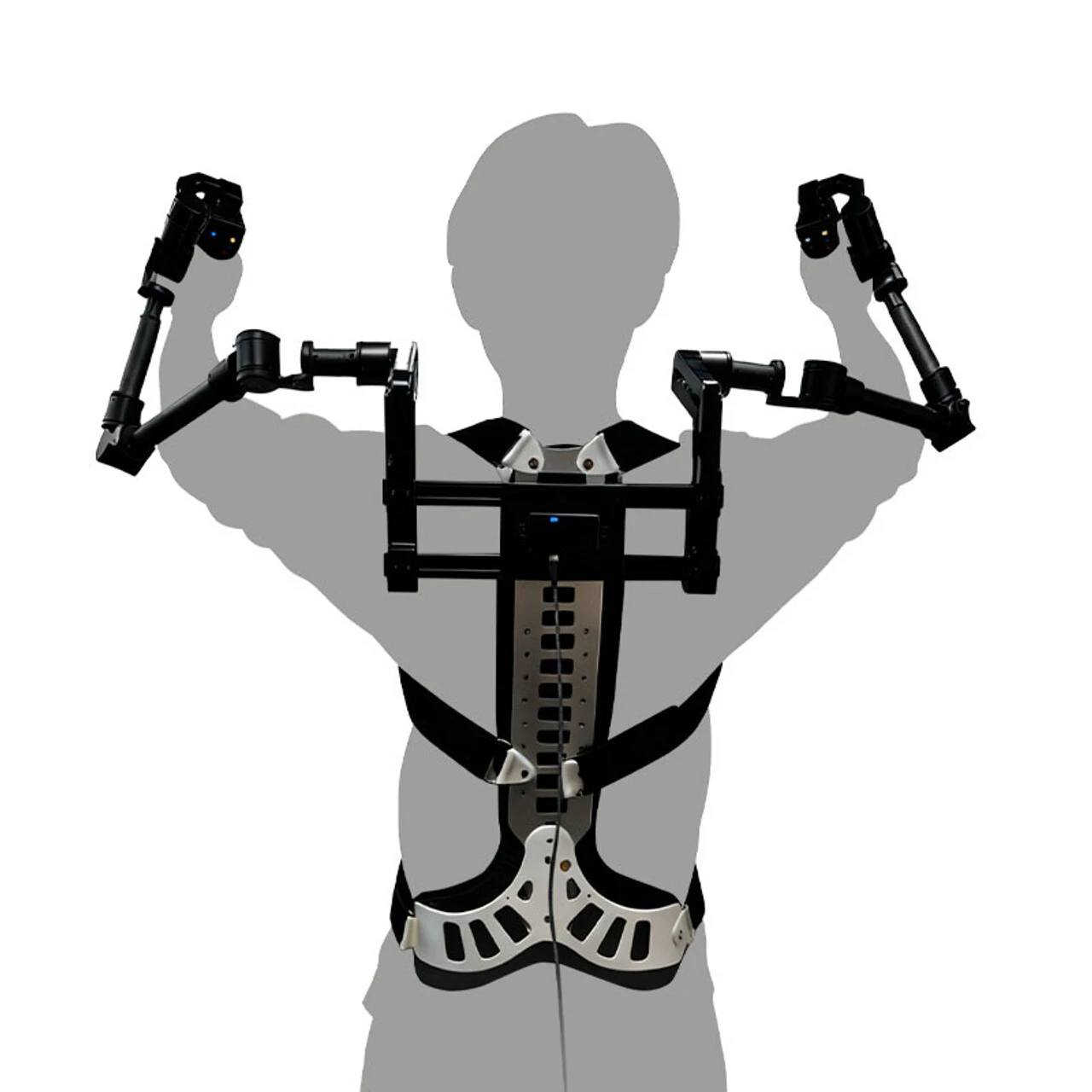
Exoesqueleto portátil: teleoperación para brazos robóticos y aplicaciones VLA, compatible con OpenArm ExoArm-7
Compatible con OpenArm
Diseño de doble brazo de 14 grados de libertad
< 20 ms de latencia ultrabaja
Longitud de brazo ajustable para un ajuste personalizado
Codificadores absolutos de 14 bits para seguimiento de precisión
SDK incluido: fácil integración y control
El brazo de teleoperación del exoesqueleto se inspira en la investigación de vanguardia en robótica humanoide y teleoperación realizada por instituciones líderes como el MIT.
Descubra el poder del control robótico intuitivo con nuestro brazo de teleoperación con exoesqueleto portátil. Diseñado para la adquisición de datos fluida y la operación remota, este sistema ligero y ergonómicamente optimizado asigna cada movimiento del brazo humano directamente a los brazos robóticos con una latencia ultrabaja (menos de 20 ms), lo que proporciona un control fluido, natural y con capacidad de respuesta.
Este sistema se puede combinar con brazos robóticos para la recopilación de datos de teleoperación de alta calidad, lo que proporciona valiosos conjuntos de datos de demostración humana para futuras aplicaciones de VLA y aprendizaje de robots.
Función y uso:
· Teleoperación: Controlar brazos robóticos a través del exoesqueleto portátil
· Adquisición de datos y análisis de movimiento: capture datos precisos de movimiento humano para el entrenamiento de IA, el aprendizaje y el desarrollo de robótica.
· Uso científico y educativo: Se utiliza en experimentos de investigación, enseñanza y cursos de robótica para control interactivo.
Características principales:
· Captura de movimiento de alta precisión: los codificadores absolutos de una sola vuelta de 14 bits garantizan una retroalimentación posicional estable y un seguimiento preciso.
· Control natural e intuitivo: cada brazo ofrece 7 grados de libertad (14 grados de libertad en total), lo que permite una manipulación fluida y realista.
· Ligero y ergonómico: cómodo, fácil de usar para un uso prolongado, diseñado para adaptarse al movimiento humano natural.
· Respuesta rápida: La transmisión instantánea de movimientos permite la teleoperación en tiempo real.
· Amplia compatibilidad: admite múltiples modelos de brazos robóticos, incluido OpenArm, con SDK para una integración rápida.
Caso de uso:
Adquisición de datos y análisis de movimiento
Recopile datos precisos de movimiento humano para el aprendizaje por imitación y el aprendizaje por refuerzo, proporcionando valiosos conjuntos de datos de demostración humana para futuras aplicaciones de aprendizaje de robots y VLA.
Uso científico y educativo
Perfecto para laboratorios de investigación, universidades y cursos de robótica, proporciona interacción práctica y control para experimentos entre humanos y robots.
Expansión del caso de uso:
Realidad virtual (RV) y realidad aumentada (RA): se pueden integrar en sistemas de RV/RA para control y simulación inmersivos.
Su compra incluye:
1x Controlador de brazo robótico portátil ExoArm-7