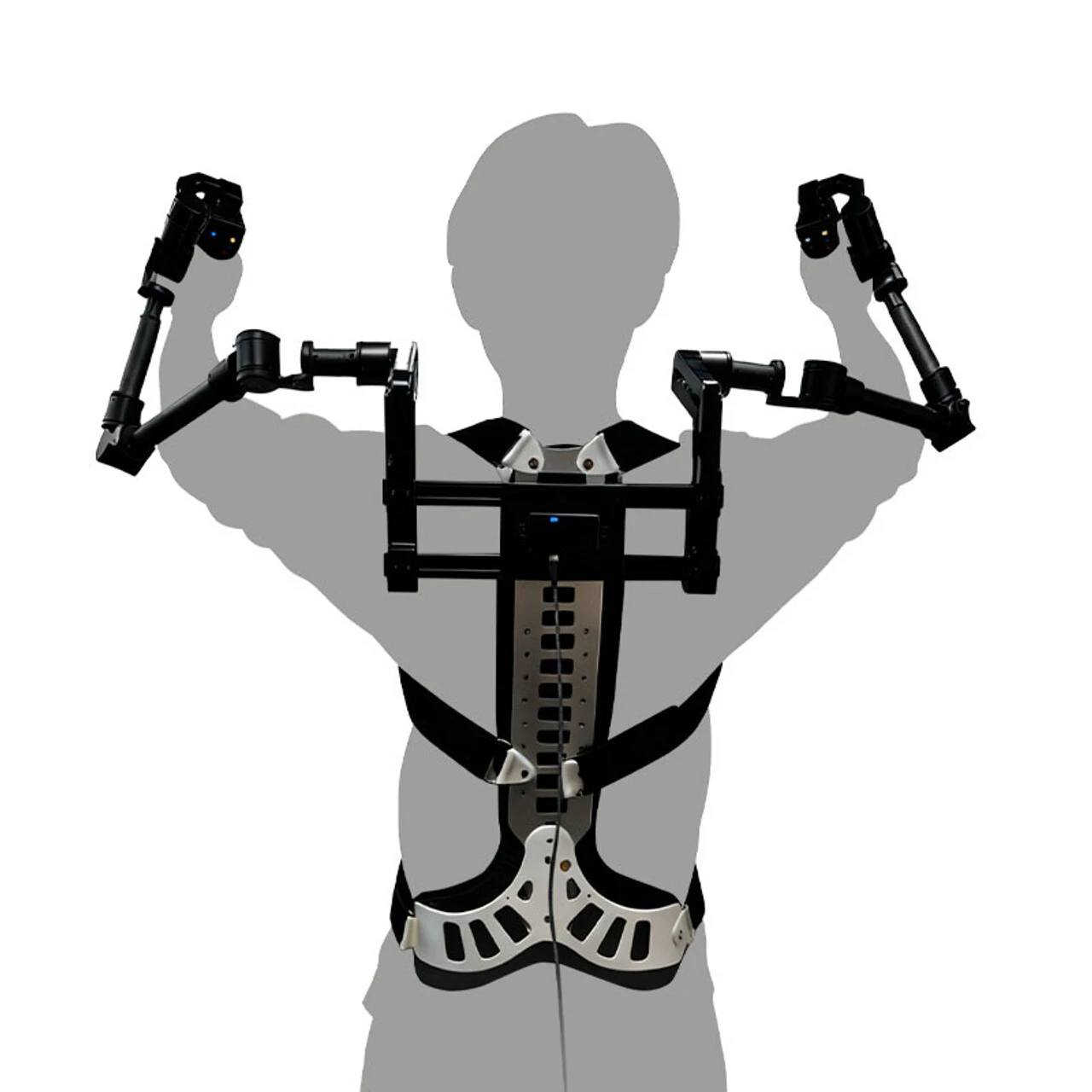
ウェアラブル外骨格 - ロボットアームおよびVLAアプリケーションの遠隔操作、OpenArm ExoArm-7と互換性あり
OpenArmと互換性あり
14自由度デュアルアーム設計
20ミリ秒未満の超低遅延
アームの長さを調整してカスタムフィットを実現
高精度トラッキングを実現する14ビットアブソリュートエンコーダ
SDK付属 – 簡単な統合と制御
外骨格遠隔操作アームには、MIT などの一流機関が実施しているヒューマノイド ロボットと遠隔操作に関する最先端の研究からインスピレーションを得ています。
ウェアラブル外骨格遠隔操作アームで、直感的なロボット制御のパワーを解き放ちましょう。シームレスなデータ取得と遠隔操作を実現するよう設計されたこの軽量で人間工学的に最適化されたシステムは、人間の腕の動きを20ミリ秒未満の超低遅延でロボットアームに直接マッピングし、スムーズで自然、かつ応答性に優れた制御を実現します。
このシステムはロボットアームと組み合わせて高品質の遠隔操作データ収集が可能で、将来の VLA およびロボット学習アプリケーションに貴重な人間のデモンストレーションデータセットを提供します。
機能と用途:
· 遠隔操作: ウェアラブル外骨格を介してロボットアームを制御する
· データ収集と動作分析: AIトレーニング、学習、ロボット開発のための正確な人間の動作データをキャプチャします
· 科学および教育用途: 研究実験、教育、インタラクティブ制御のためのロボット工学コースで使用
主な特徴:
· 高精度モーションキャプチャ: 14 ビットのシングルターンアブソリュートエンコーダにより、安定した位置フィードバックと正確なトラッキングが保証されます。
· 自然で直感的なコントロール: 各アームは 7 つの自由度 (合計 14 DOF) を備えており、滑らかでリアルな操作が可能です。
· 軽量で人間工学的: 快適で、長時間使用しても装着しやすく、自然な人間の動きにフィットするように設計されています。
· 迅速な対応: 動きを瞬時に伝達することで、リアルタイムの遠隔操作が可能になります。
· 幅広い互換性: OpenArm を含む複数のロボット アーム モデルをサポートし、SDK により迅速な統合が可能です。
使用事例:
データ収集と動作解析
模倣学習、強化学習のための正確な人間の動作データを収集し、将来の VLA およびロボット学習アプリケーションのための貴重な人間のデモンストレーション データセットを提供します。
科学および教育用途
研究室、大学、ロボット工学コースに最適で、人間とロボットの実験のための実践的なインタラクションと制御を提供します。
ユースケースの拡張:
仮想現実 (VR) と拡張現実 (AR): 没入型の制御とシミュレーションのために VR/AR システムに統合できます。
購入内容:
ExoArm-7 外骨格ウェアラブルロボットアームコントローラー x 1