يوفر Foxtech حلول الطائرات بدون طيار الصناعية & أنظمة الحمولة النافعة للطائرات بدون طيار.













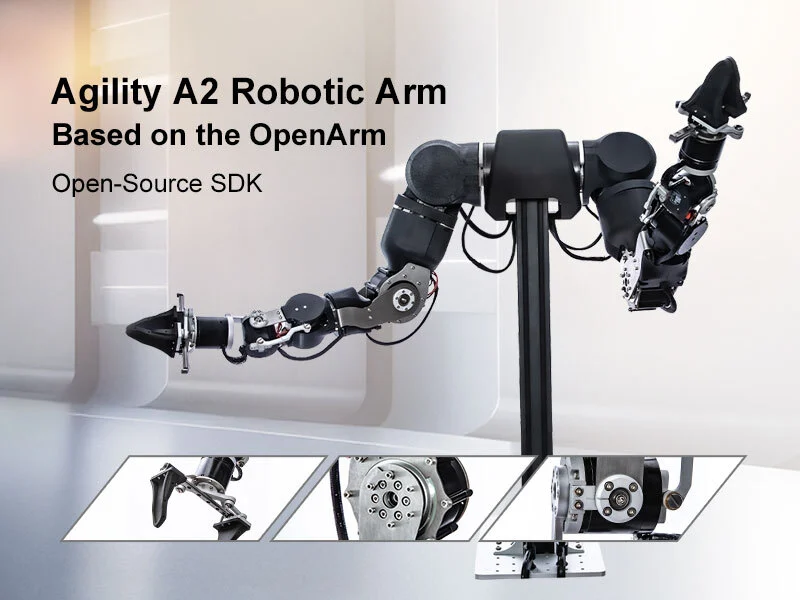
منصة أبحاث الروبوتات ثنائية الذراع Agility A2 القائمة على OpenArm - للذكاء الاصطناعي المجسد، وROS2، وتعلم الروبوتات | حمولة عالية، ومعالجة ثنائية اليد، والتحكم عن بعد
مختبرات الجامعة والبحوث – الذكاء الاصطناعي المجسد وتعلم الروبوتات
سيناريوهات خطرة ومتخصصة – التحكم عن بعد والتشغيل عن بعد
الروبوتات والبحث والتطوير الصناعي – التجميع بذراعين والتعاون بين الإنسان والروبوت
مختبرات تعليمية، تدريب وعروض توضيحية – تعليم الروبوتات والمهارات العملية
Agility A2 هي منصة بحثية روبوتية ثنائية الذراع عالية الحمولة. يوفر كل ذراع 7 درجات حرية وحمولة قصوى تصل إلى 5 كجم / 12 كجم، مما يمنح الباحثين ذراعًا ثنائية اليد رائدة في فئتها، تتميز بقوة كافية للتعامل مع الأدوات وقطع العمل في العالم الحقيقي، وفي الوقت نفسه صغيرة الحجم بما يكفي لتناسب طاولة المختبر. بفضل هيكلها المصنوع من سبائك الألومنيوم والفولاذ المقاوم للصدأ، ومفاصلها المتوافقة مع معيار QDD، ونظام محركها القوي بجهد 48 فولت، توفر المنصة حركة سلسة تحاكي الحركة البشرية وتشغيلًا موثوقًا به على المدى الطويل.
صُمم نظام Agility A2 خصيصًا لتطبيقات الذكاء الاصطناعي المجسد وتعلم الروبوتات، وهو يدعم ROS2 وNVIDIA Isaac بشكلٍ أصلي، مما يُسهّل جمع بيانات عالية الجودة عن بُعد وبيانات مُبرمجة، وتطبيق سياسات التعلم بالتقليد أو التعلم المعزز أو التعلم القائم على VLA على أجهزة حقيقية. يمكن توصيل الروبوت التابع بأجهزة تحكم خارجية (وحدات تحكم الواقع الافتراضي، الهياكل الخارجية، الأذرع الرئيسية المُخصصة، إلخ) لتشكيل نظام تحكم عن بُعد متكامل، أو تشغيله مباشرةً عبر ROS2 لإجراء تجارب مستقلة. تشمل حالات الاستخدام الشائعة أبحاث التلاعب الثنائي، والتجميع الذي يتطلب تلامسًا مباشرًا، ودراسات التعاون بين الإنسان والروبوت، ومختبرات التدريس الجامعية التي تحتاج إلى منصة مفتوحة وقابلة للتوسيع ذات ذراعين.

يأتي الروبوت مزودًا بحاسوب صناعي مدمج ومجموعة برامج كاملة. نظام التشغيل أوبونتو 22.04 مع نظام التشغيل ROS2 Humble مثبت مسبقًا، بالإضافة إلى حزمة تطوير البرامج OpenArmX التي تتضمن ما يلي:
motor_manage_openarmx – نظام إدارة محركات داخلي للتكوين والمراقبة والتشخيص
motor_tests_openarmx_com – نصوص بايثون داخلية لاختبار التحكم في المحركات والتشغيل السريع
openarm_can_openarmx_com – برنامج تشغيل محرك CAN مُعدّل لـ OpenArmX
openarm_description – حزمة نماذج الروبوت للمحاكاة والتصور
وحدة التحكم openarm_ros2 – وحدة تحكم ROS2 للتحكم في الحركة وتكامل التطبيقات
openarm_utils – حزمة وضع التعليم/العرض التوضيحي المطورة داخليًا للتشغيل عن بُعد والتسجيل السريع
حالة الاستخدام:
مختبرات الجامعة والبحوث – الذكاء الاصطناعي المجسد وتعلم الروبوتات
تُستخدم هذه المنصة ثنائية الذراع المزودة بنظام ROS2 في مختبرات الجامعات والمعاهد العاملة في مجال الذكاء الاصطناعي المجسد، وتعلم الروبوتات، والتعلم بالتقليد، والتعلم المعزز. تُستخدم هذه المنصة لجمع البيانات وتقييم سياسات التحكم القائمة على خوارزمية VLA في مهام التلاعب اليدوي الثنائية الحقيقية، مثل الإمساك والفرز والتجميع.
سيناريوهات خطرة ومتخصصة – التحكم عن بعد والتشغيل عن بعد
للمختبرات التي تحاكي سير العمل النووي أو الكيميائي أو البيولوجي التي تتطلب تشغيلًا عن بُعد وتحكمًا عن بُعد. يتحكم المشغلون في الذراعين المزدوجتين لتدوير الصمامات، وتحريك المفاتيح، والتقاط القوارير، ونقل العينات، ودراسة التشغيل عن بُعد، واستراتيجيات السلامة، والتحكم المباشر دون تعريض البشر لبيئات خطرة.
الروبوتات والبحث والتطوير الصناعي – التجميع بذراعين والتعاون بين الإنسان والروبوت
لشركات الروبوتات وفرق البحث والتطوير الصناعية التي تعمل على تصميم نماذج أولية لخلايا العمل ثنائية الذراع والروبوتات التعاونية. يقوم الذراع الآلي ثنائي اليد ذو الحمولة العالية بمهام تجميع تتطلب تلامسًا مكثفًا - مثل توصيل الموصلات، وشد البراغي، والتعامل مع الأدوات، وتثبيت أو قلب الأجزاء - مما يتيح تقييم أنظمة التحكم في المعاوقة، والتحكم في القوة، وأنظمة التعاون بين الإنسان والروبوت قبل النشر.
مختبرات تعليمية، تدريب وعروض توضيحية – تعليم الروبوتات والمهارات العملية
تُستخدم هذه المنصة المفتوحة ثنائية الذراع في مختبرات التدريس الجامعية ومراكز التدريب المهني ومساحات العرض التي تركز على الروبوتات والأتمتة. وهي تدعم دورات عملية في علم حركية الروبوتات، والتحكم بنظام ROS2، والتشغيل عن بُعد، والذكاء الاصطناعي المُجسّد، ويمكن تحويلها إلى عروض توضيحية تفاعلية للمتاحف العلمية أو المعارض التجارية.
يشمل شراؤك ما يلي:
مجموعة ذراع روبوتية واحدة:
ذراع روبوتية واحدة من نوع Agility A2 (ذراع مزدوجة)
جهاز كمبيوتر تحكم صناعي واحد (معالج Intel i7 + ذاكرة وصول عشوائي 16 جيجابايت + قرص صلب SSD بسعة 256 جيجابايت)
مجموعة واحدة من أسلاك التوصيل
مجموعة التحكم عن بعد المتماثلة:
ذراع روبوتية واحدة من طراز Agility A2 – القائد
ذراع روبوتية واحدة من طراز Agility A2 - ذراع تابع
جهاز كمبيوتر تحكم صناعي واحد (معالج Intel i7-10510U + ذاكرة وصول عشوائي DDR4 سعة 16 جيجابايت + قرص صلب SSD سعة 512 جيجابايت + واي فاي)
مجموعتان كاملتان من أسلاك التوصيل