Foxtech предоставляет решения промышленных беспилотников & Системы полезной нагрузки беспилотника.













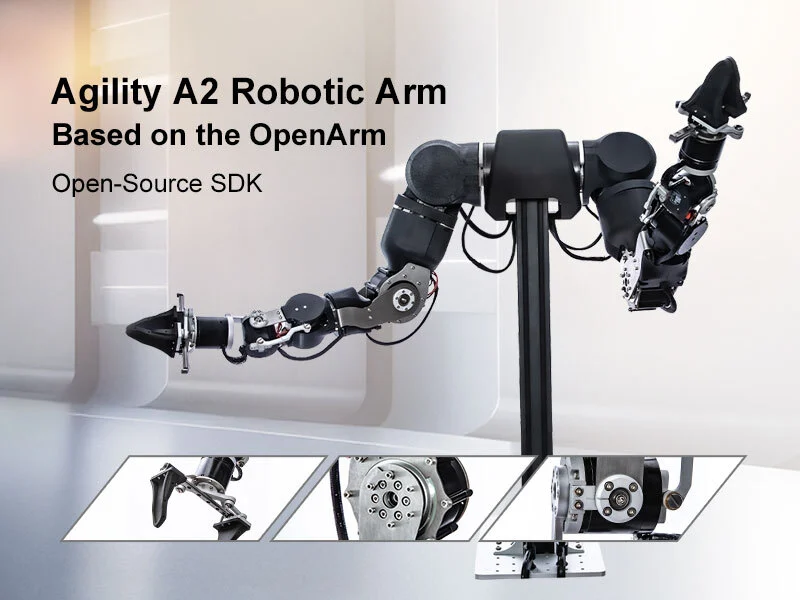
Исследовательская роботизированная платформа Agility A2 с двумя манипуляторами на базе OpenArm — для воплощенного ИИ, ROS2 и обучения роботов | Высокая грузоподъемность, двуручное управление и дистанционное телеуправление
Университетские и исследовательские лаборатории – Воплощенный искусственный интеллект и робототехническое обучение
Опасные и специализированные сценарии – дистанционное управление и телеуправление
Робототехника и промышленные исследования и разработки – двуручная сборка и взаимодействие человека и робота.
Учебные лаборатории, тренировки и демонстрации – робототехника и практические навыки.
Agility A2 — это высоконагруженная двухрукая роботизированная исследовательская платформа. Каждая рука имеет 7 степеней свободы и номинальную грузоподъемность до 5 кг / пиковую — до 12 кг, предоставляя исследователям лучший в своем классе двуручный манипулятор, достаточно мощный для работы с реальными инструментами и заготовками, и в то же время достаточно компактный, чтобы поместиться на лабораторном столе. Благодаря конструкции из алюминиевого сплава и нержавеющей стали, шарнирам, совместимым с QDD, и надежной 48-вольтовой системе привода, платформа обеспечивает плавные, человекоподобные движения и надежную долговременную работу.
Разработанная для воплощенного искусственного интеллекта и обучения роботов, платформа Agility A2 изначально поддерживает ROS2 и NVIDIA Isaac, что упрощает сбор высококачественных данных о телеуправлении и скриптовых данных, а также развертывание стратегий на основе имитационного обучения, обучения с подкреплением или VLA на реальном оборудовании. Следующее устройство может быть подключено к внешним ведущим устройствам (VR-контроллерам, экзоскелетам, пользовательским ведущим манипуляторам и т. д.) для формирования полноценной системы телеуправления «ведущий-ведомый» или управляться напрямую через ROS2 для автономных экспериментов. Типичные варианты использования включают исследования бимануального манипулирования, сборку с большим количеством контактов, исследования взаимодействия человека и робота, а также университетские учебные лаборатории, которым необходима открытая, расширяемая платформа с двумя манипуляторами.

Робот поставляется со встроенным промышленным ПК и полным набором программного обеспечения. Предустановлена операционная система Ubuntu 22.04 с ROS2 Humble, а также SDK OpenArmX, который включает в себя:
motor_manage_openarmx – собственная система управления двигателями для настройки, мониторинга и диагностики.
motor_tests_openarmx_com – собственные скрипты на Python для тестирования управления двигателем и быстрой настройки.
openarm_can_openarmx_com – адаптированный драйвер CAN-двигателя для OpenArmX
openarm_description – пакет для моделирования и визуализации роботов.
openarm_ros2 – модуль управления ROS2 для управления движением и интеграции с приложениями.
openarm_utils – разработанный внутри компании пакет для обучения/демонстрации, обеспечивающий быстрое дистанционное управление и запись.
Пример использования:
Университетские и исследовательские лаборатории – Воплощенный искусственный интеллект и робототехническое обучение
Для университетских и институтских лабораторий, работающих над воплощенным искусственным интеллектом, обучением роботов, имитационным обучением и обучением с подкреплением. Двурукая платформа с ROS2 используется для сбора данных и оценки стратегий управления на основе VLA в реальных задачах двуручного манипулирования, таких как захват, сортировка и сборка.
Опасные и специализированные сценарии – дистанционное управление и телеуправление
Для лабораторий, имитирующих процессы ядерной, химической или биологической безопасности, требующие дистанционного управления по принципу «ведущий-ведомый» и удаленного манипулирования. Операторы управляют двумя манипуляторами для поворота клапанов, переключения тумблеров, захвата флаконов и переноса образцов, изучая дистанционное управление, стратегии безопасности и манипуляции с большим количеством контактов, не подвергая людей воздействию опасных условий.
Робототехника и промышленные исследования и разработки – двуручная сборка и взаимодействие человека и робота.
Для робототехнических компаний и научно-исследовательских групп, занимающихся прототипированием двуручных рабочих ячеек и коллаборативных роботов. Высоконагрузочный двуручный манипулятор выполняет задачи сборки с большим количеством контактов — подключение разъемов, затягивание винтов, перемещение инструментов и зажим или переворачивание деталей — что позволяет оценить схемы управления импедансом, управления силой и взаимодействия человека и робота перед внедрением.
Учебные лаборатории, тренировки и демонстрации – робототехника и практические навыки.
Для университетских учебных лабораторий, центров профессионального обучения и демонстрационных площадок, специализирующихся на робототехнике и автоматизации. Открытая двурукая платформа поддерживает практические курсы по кинематике роботов, управлению ROS2, телеуправлению и воплощенному искусственному интеллекту, а также может быть преобразована в интерактивные демонстрации для научных музеев или выставок.
В комплект вашей покупки входит:
Комплект из одной роботизированной руки:
1× Роботизированная рука Agility A2 (двурукая)
1× Промышленный управляющий компьютер (Intel i7 + 16 ГБ ОЗУ + 256 ГБ SSD)
1 комплект кабельных жгутов
Изоморфный набор телеуправления:
1× Роботизированная рука Agility A2 – Leader
1× Роботизированная рука Agility A2 – ведомая
1× Промышленный управляющий компьютер (Intel i7-10510U + 16 ГБ DDR4 RAM + 512 ГБ SSD + Wi-Fi)
2 комплекта кабельных жгутов в сборе