












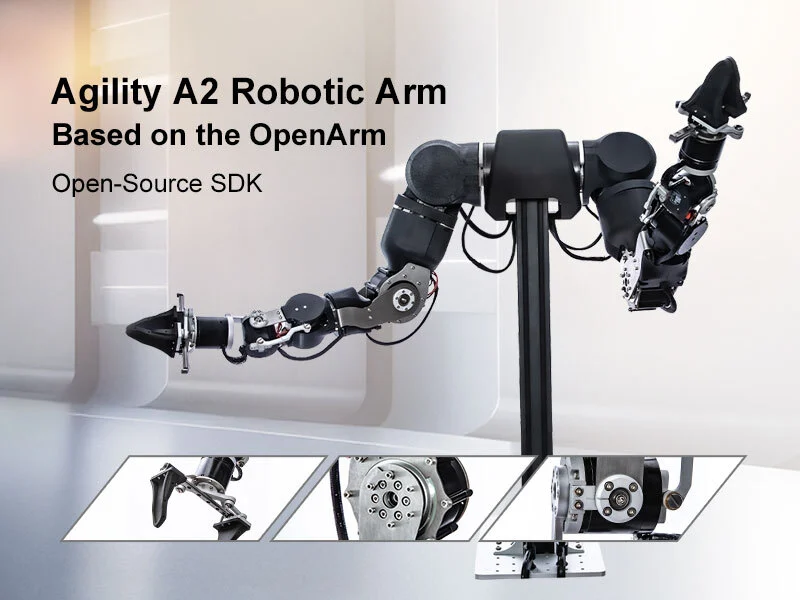
Agility A2デュアルアームロボット研究プラットフォーム(OpenArmベース) - 身体化AI、ROS2、ロボット学習向け | 高ペイロード、両手操作、遠隔操作
大学・研究機関 – 身体化されたAIとロボット学習
危険かつ特殊なシナリオ – 遠隔操作および遠隔操作
ロボット工学および産業研究開発 – デュアルアーム組立および人間とロボットの協働
教育ラボ、トレーニング、デモ – ロボット工学教育と実践的なスキル
Agility A2は、高負荷対応のデュアルアーム型ロボット研究プラットフォームです。各アームは7自由度(DOF)を備え、定格負荷5kg、最大負荷12kgのペイロードに対応します。これにより、研究者は実世界の工具やワークピースを扱うのに十分なパワーを持ちながら、実験台に収まるコンパクトさを兼ね備えた、クラス最高レベルの両手操作マニピュレーターを利用できます。アルミニウム合金とステンレス鋼の構造、QDD規格に準拠したジョイント、堅牢な48V駆動システムにより、滑らかで人間のような動きと、長期にわたる信頼性の高い動作を実現します。
身体化されたAIとロボット学習向けに設計されたAgility A2は、ROS2とNVIDIA Isaacをネイティブにサポートしており、高品質の遠隔操作データとスクリプトデータの収集、模倣学習、強化学習、またはVLAベースのポリシーの実機への展開を容易にします。フォロワーは、外部のリーダーデバイス(VRコントローラー、外骨格、カスタムマスターアームなど)に接続して、完全なリーダー・フォロワー遠隔操作システムを構成したり、ROS2を介して直接駆動して自律的な実験を行うことができます。典型的なユースケースとしては、両手操作の研究、接触の多い組み立て作業、人間とロボットの協働研究、オープンで拡張可能なデュアルアームプラットフォームを必要とする大学の教育ラボなどが挙げられます。

このロボットには、産業用PCと完全なソフトウェアスタックが内蔵されています。Ubuntu 22.04とROS2 Humbleがプリインストールされており、OpenArmX SDKも含まれています。
motor_manage_openarmx – 設定、監視、診断のための社内開発モーター管理システム
motor_tests_openarmx_com – モーター制御テストと迅速な起動のための社内Pythonスクリプト
openarm_can_openarmx_com – OpenArmX 用に改良された CAN モータードライバー
openarm_description – シミュレーションと可視化のためのロボットモデルパッケージ
openarm_ros2 – モーションコントロールとアプリケーション統合のためのROS2制御モジュール
openarm_utils – 遠隔操作と録画を迅速に行うための、社内開発の教育/デモンストレーションモードパッケージ
使用事例:
大学・研究機関 – 身体化されたAIとロボット学習
身体化AI、ロボット学習、模倣学習、強化学習に取り組む大学や研究所の研究室向け。ROS2を搭載したデュアルアームプラットフォームは、把持、仕分け、組み立てといった実際の両手操作タスクにおいて、VLAベースの制御ポリシーに関するデータを収集・評価するために使用されます。
危険かつ特殊なシナリオ – 遠隔操作および遠隔操作
原子力、化学、バイオセーフティ関連のワークフローをシミュレートする実験室向け。リーダー・フォロワー型の遠隔操作とリモート操作が求められる環境において、オペレーターはデュアルアームを操作してバルブを回したり、スイッチを切り替えたり、バイアルをピックアップしたり、サンプルを移送したりすることで、危険な環境に人間をさらすことなく、遠隔操作、安全対策、接触を伴う操作について学習できます。
ロボット工学および産業研究開発 – デュアルアーム組立および人間とロボットの協働
ロボット企業や産業研究開発チーム向けに、デュアルアームワークセルや協働ロボットのプロトタイプ開発を行う際に活用できます。高可搬重量の両手マニピュレーターは、コネクタの差し込み、ネジの締め付け、工具の取り扱い、部品の固定や反転など、接触を伴う組み立て作業を実行することで、実用化前にインピーダンス制御、力制御、人間とロボットの協働方式を評価することを可能にします。
教育ラボ、トレーニング、デモ – ロボット工学教育と実践的なスキル
大学の教育研究室、職業訓練センター、ロボット工学と自動化に特化したデモスペース向け。オープンなデュアルアームプラットフォームは、ロボットの運動学、ROS2制御、遠隔操作、具現化されたAIに関する実践的なコースをサポートし、科学博物館や展示会向けのインタラクティブなデモンストレーションにも活用できます。
ご購入内容:
単体ロボットアームセット:
Agility A2 ロボットアーム(デュアルアーム)×1
産業用制御コンピュータ×1台(Intel i7 + 16GB RAM + 256GB SSD)
ケーブルハーネスセット×1
同型遠隔操作セット:
Agility A2 ロボットアーム – リーダー 1台
Agility A2 ロボットアーム – フォロワー 1個
産業用制御コンピュータ×1台(Intel i7-10510U + 16GB DDR4 RAM + 512GB SSD + Wi-Fi)
ケーブルハーネスセット2個