Foxtech proporciona soluciones de drones industriales & Sistemas de carga útil de UAV.













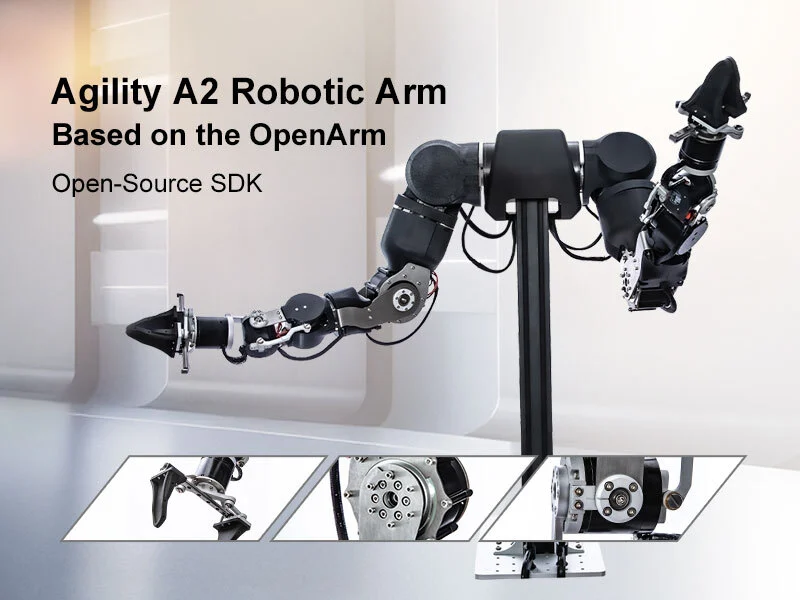
Plataforma robótica de investigación de doble brazo Agility A2 basada en OpenArm: para IA integrada, ROS2 y aprendizaje robótico | Alta capacidad de carga, manipulación bimanual y teleoperación remota.
Universidad y laboratorios de investigación: IA integrada y aprendizaje robótico.
Escenarios peligrosos y especializados: manipulación remota y teleoperación.
Robótica e I+D industrial: Ensamblaje de doble brazo y colaboración humano-robot
Laboratorios de enseñanza, capacitación y demostraciones: educación en robótica y habilidades prácticas.
Agility A2 es una plataforma robótica de investigación de doble brazo con alta capacidad de carga. Cada brazo ofrece 7 grados de libertad y una carga útil nominal de hasta 5 kg / carga máxima de 12 kg, lo que proporciona a los investigadores un manipulador bimanual líder en su clase, lo suficientemente potente para herramientas y piezas de trabajo reales, pero lo suficientemente compacto para caber en una mesa de laboratorio. Con una construcción de aleación de aluminio y acero inoxidable, articulaciones compatibles con QDD y un robusto sistema de accionamiento de 48 V, la plataforma ofrece movimientos suaves y similares a los humanos, así como un funcionamiento fiable a largo plazo.
Diseñado para la IA integrada y el aprendizaje robótico, Agility A2 es compatible de forma nativa con ROS2 y NVIDIA Isaac, lo que facilita la recopilación de datos de teleoperación y scripts de alta calidad, así como la implementación de aprendizaje por imitación, aprendizaje por refuerzo o políticas basadas en VLA en hardware real. El robot seguidor puede conectarse a dispositivos líderes externos (controladores de realidad virtual, exoesqueletos, brazos maestros personalizados, etc.) para formar un sistema completo de teleoperación líder-seguidor, o bien controlarse directamente mediante ROS2 para experimentos autónomos. Entre los casos de uso típicos se incluyen la investigación de manipulación bimanual, el ensamblaje con gran interacción, los estudios de colaboración humano-robot y los laboratorios de enseñanza universitaria que requieren una plataforma de doble brazo abierta y extensible.

El robot se entrega con un PC industrial integrado y un paquete de software completo. Ubuntu 22.04 con ROS2 Humble viene preinstalado, junto con un SDK de OpenArmX que incluye:
motor_manage_openarmx: sistema interno de gestión de motores para configuración, monitorización y diagnóstico.
motor_tests_openarmx_com – scripts Python propios para pruebas de control de motores y puesta en marcha rápida.
openarm_can_openarmx_com – controlador de motor CAN adaptado para OpenArmX
openarm_description – Paquete de modelos de robots para simulación y visualización
openarm_ros2 – Módulo de control ROS2 para control de movimiento e integración de aplicaciones
openarm_utils: paquete de modo de enseñanza/demostración desarrollado internamente para teleoperación y grabación rápidas.
Caso de uso:
Universidad y laboratorios de investigación: IA integrada y aprendizaje robótico.
Para laboratorios universitarios e institutos que trabajan en IA integrada, aprendizaje robótico, aprendizaje por imitación y aprendizaje por refuerzo. La plataforma de doble brazo con ROS2 se utiliza para recopilar datos y evaluar políticas de control basadas en VLA en tareas reales de manipulación bimanual, como agarrar, clasificar y ensamblar.
Escenarios peligrosos y especializados: manipulación remota y teleoperación.
Para laboratorios que simulan flujos de trabajo nucleares, químicos o de bioseguridad que requieren teleoperación líder-seguidor y manipulación remota. Los operadores controlan los brazos duales para girar válvulas, accionar interruptores, recoger viales y transferir muestras, estudiando la teleoperación, las estrategias de seguridad y la manipulación con contacto directo sin exponer a los humanos a entornos peligrosos.
Robótica e I+D industrial: Ensamblaje de doble brazo y colaboración humano-robot
Para empresas de robótica y equipos de I+D industrial que desarrollan prototipos de células de trabajo de doble brazo y robots colaborativos. El manipulador bimanual de alta capacidad de carga realiza tareas de ensamblaje que requieren un gran contacto físico (conectar conectores, apretar tornillos, manipular herramientas y sujetar o voltear piezas), lo que permite evaluar el control de impedancia, el control de fuerza y los esquemas de colaboración humano-robot antes de su implementación.
Laboratorios de enseñanza, capacitación y demostraciones: educación en robótica y habilidades prácticas.
Para laboratorios de enseñanza universitaria, centros de formación profesional y espacios de demostración centrados en robótica y automatización. La plataforma abierta de doble brazo permite realizar cursos prácticos sobre cinemática robótica, control ROS2, teleoperación e IA integrada, y puede transformarse en demostraciones interactivas para museos de ciencia o ferias comerciales.
Su compra incluye:
Conjunto de brazo robótico individual:
1× Brazo robótico Agility A2 (doble brazo)
1 ordenador de control industrial (Intel i7 + 16 GB de RAM + 256 GB de SSD)
1 juego de arnés de cables
Conjunto de teleoperación isomórfica:
1× Brazo Robótico Agility A2 – Líder
1× Brazo Robótico Agility A2 – Seguidor
1 ordenador de control industrial (Intel i7-10510U + 16 GB de RAM DDR4 + SSD de 512 GB + Wi-Fi)
2 juegos completos de arneses de cables