Foxtech bietet Industrie -Drohnenlösungen an & UAV -Nutzlastsysteme.













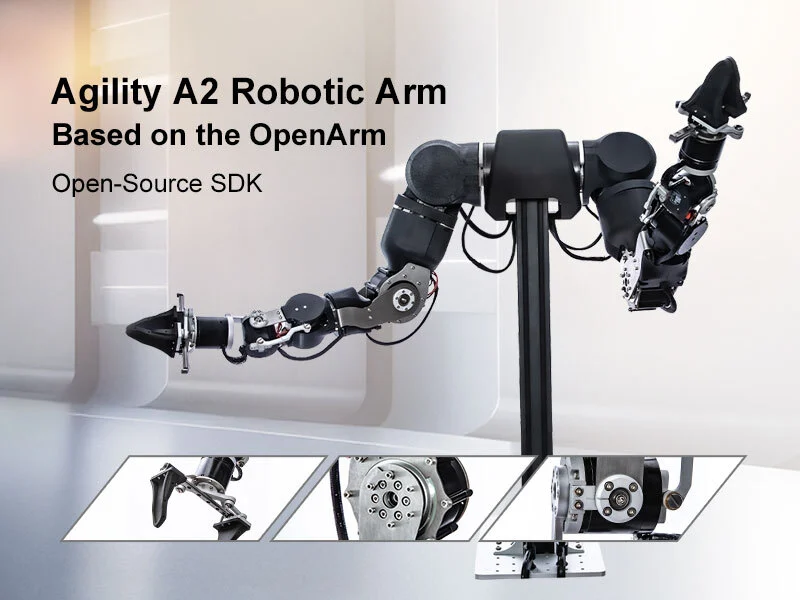
Agility A2 Dual-Arm-Robotik-Forschungsplattform basierend auf OpenArm – für verkörperte KI, ROS2 und Roboterlernen | Hohe Nutzlast, beidhändige Manipulation und Fernsteuerung
Universitäten und Forschungslabore – Verkörperte KI und Roboterlernen
Gefährliche und spezielle Szenarien – Fernsteuerung und Teleoperation
Robotik & Industrielle Forschung & Entwicklung – Zweiarm-Montage & Mensch-Roboter-Kollaboration
Lehrlabore, Schulungen & Vorführungen – Robotikausbildung & praktische Fertigkeiten
Agility A2 ist eine hochbelastbare, zweiarmige Roboterplattform für Forschungszwecke. Jeder Arm bietet 7 Freiheitsgrade und eine Traglast von bis zu 5 kg (maximal 12 kg). Damit erhalten Forscher einen erstklassigen, zweihändigen Manipulator, der leistungsstark genug für reale Werkzeuge und Werkstücke ist und gleichzeitig kompakt genug für den Einsatz auf einer Laborbank. Dank der Konstruktion aus Aluminiumlegierung und Edelstahl, QDD-kompatiblen Gelenken und einem robusten 48-V-Antriebssystem ermöglicht die Plattform flüssige, menschenähnliche Bewegungen und einen zuverlässigen Langzeitbetrieb.
Agility A2 wurde für verkörperte KI und Roboterlernen entwickelt und unterstützt nativ ROS2 und NVIDIA Isaac. Dadurch lassen sich hochwertige Teleoperations- und Skriptdaten einfach erfassen und Imitationslernen, Reinforcement Learning oder VLA-basierte Strategien auf realer Hardware implementieren. Der Follower kann mit externen Leader-Geräten (VR-Controllern, Exoskeletten, kundenspezifischen Master-Armen usw.) zu einem vollständigen Leader-Follower-Teleoperationssystem verbunden oder direkt über ROS2 für autonome Experimente gesteuert werden. Typische Anwendungsfälle sind die Forschung zur beidhändigen Manipulation, die Montage kontaktreicher Systeme, Studien zur Mensch-Roboter-Kollaboration und universitäre Lehrlabore, die eine offene, erweiterbare Zweiarmplattform benötigen.

Der Roboter wird mit einem integrierten Industrie-PC und einem kompletten Software-Stack ausgeliefert. Ubuntu 22.04 mit ROS2 Humble ist vorinstalliert, zusammen mit einem OpenArmX SDK, das Folgendes beinhaltet:
motor_manage_openarmx – hauseigenes Motormanagementsystem für Konfiguration, Überwachung und Diagnose
motor_tests_openarmx_com – Interne Python-Skripte für Motorsteuerungstests und schnelle Inbetriebnahme
openarm_can_openarmx_com – angepasster CAN-Motortreiber für OpenArmX
openarm_description – Robotermodellpaket für Simulation und Visualisierung
openarm_ros2 – ROS2-Steuermodul für Bewegungssteuerung und Anwendungsintegration
openarm_utils – ein intern entwickeltes Paket für den Lehr-/Demonstrationsmodus zur schnellen Fernsteuerung und Aufzeichnung
Anwendungsfall:
Universitäten und Forschungslabore – Verkörperte KI und Roboterlernen
Für Universitäts- und Institutslabore, die an verkörperter KI, Roboterlernen, Imitationslernen und bestärkendem Lernen arbeiten. Die Zweiarmplattform mit ROS2 wird eingesetzt, um Daten zu sammeln und VLA-basierte Steuerungsstrategien für reale, beidhändige Manipulationsaufgaben wie Greifen, Sortieren und Montieren zu evaluieren.
Gefährliche und spezielle Szenarien – Fernsteuerung und Teleoperation
Für Labore, die Arbeitsabläufe in der Nuklear-, Chemie- oder Biosicherheit simulieren und dabei eine Fernsteuerung mit Führungs- und Folgesteuerung sowie Fernmanipulation erfordern. Die Bediener steuern die beiden Arme, um Ventile zu drehen, Schalter umzulegen, Probenfläschchen aufzunehmen und Proben zu transferieren. So können Fernsteuerung, Sicherheitsstrategien und kontaktintensive Manipulationen untersucht werden, ohne dass Menschen gefährlichen Umgebungen ausgesetzt werden.
Robotik & Industrielle Forschung & Entwicklung – Zweiarm-Montage & Mensch-Roboter-Kollaboration
Für Robotikunternehmen und industrielle F&E-Teams, die Prototypen von Zweiarm-Arbeitszellen und kollaborativen Robotern entwickeln. Der hochbelastbare, zweihändige Manipulator führt kontaktintensive Montageaufgaben durch – Stecken von Steckverbindern, Anziehen von Schrauben, Handhaben von Werkzeugen und Spannen oder Wenden von Teilen – und ermöglicht so die Evaluierung von Impedanzregelung, Kraftregelung und Mensch-Roboter-Kollaborationssystemen vor dem Einsatz.
Lehrlabore, Schulungen & Vorführungen – Robotikausbildung & praktische Fertigkeiten
Für universitäre Lehrlabore, Berufsbildungszentren und Demonstrationsräume mit Schwerpunkt auf Robotik und Automatisierung. Die offene Zweiarmplattform unterstützt praxisorientierte Kurse zu Roboterkinematik, ROS2-Steuerung, Teleoperation und verkörperter KI und kann für interaktive Demonstrationen in Wissenschaftsmuseen oder auf Messen genutzt werden.
Ihr Kauf beinhaltet:
Einzelner Roboterarm-Satz:
1× Agility A2 Roboterarm (Doppelarm)
1× Industrieller Steuerungsrechner (Intel i7 + 16 GB RAM + 256 GB SSD)
1× Kabelbaum-Set
Isomorphes Teleoperationsset:
1× Agility A2 Roboterarm – Leader
1× Agility A2 Roboterarm – Follower
1× Industrieller Steuerungsrechner (Intel i7-10510U + 16 GB DDR4 RAM + 512 GB SSD + Wi-Fi)
2 komplette Kabelbaumsätze