オープンソースロボットアーム用モジュラージョイントモーターシステム:OpenArm向けDAMIAOソリューション
オープンソースのロボットイノベーションのための精密エンジニアリングされたドライブソリューション
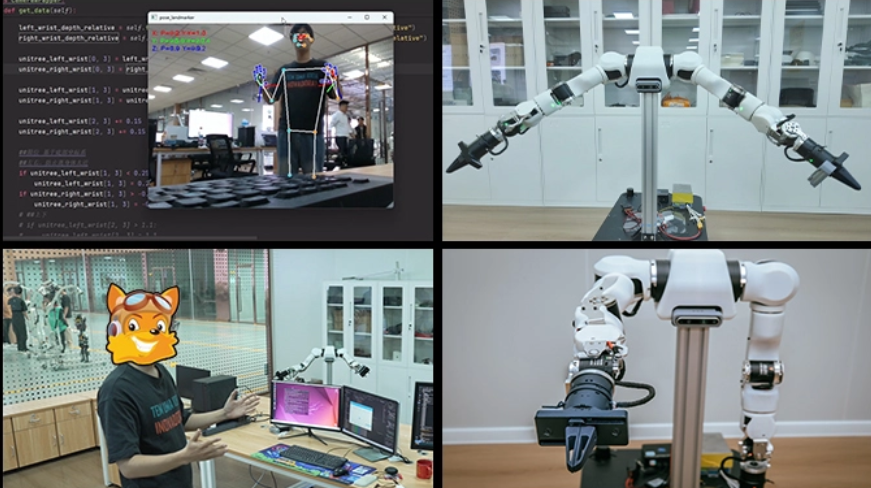
DAMIAO ジョイント モーター システムは、 OpenArm オープンソース ヒューマノイド ロボット アーム専用に設計された完全に統合されたドライブ プラットフォームであり、研究者、開発者、ロボット エンジニアに高性能なモーション コントロールのためのプロフェッショナル グレードの基盤を提供します。
DAMIAOの43シリーズと8009P関節モーターを組み合わせることで、トルク、速度、精度の最適なバランスを実現し、肩から手首までの自然で協調的な動きを実現します。各モーターモジュールには、パワーエレクトロニクス、センシング、通信機能が統合されており、配線の複雑さを最小限に抑えながら制御効率を最大化します。

主な特徴
1. 最適化されたジョイントアーキテクチャ
各モーターは、対応するジョイントのトルクと動作要件に合わせて慎重に選択されます。
DAMIAO システムは、高負荷の肩関節から軽量な手首モジュールまで、腕全体にわたって一貫した機械的性能と動的安定性を保証します。
2. 堅牢なクロスローラーベアリング構造
このシステムは高精度クロスローラーベアリング設計を採用しており、優れた剛性と位置決め精度を実現します。
この構造は非対称または多方向の力に効果的に抵抗し、重い負荷や不均衡な負荷がかかった場合でもスムーズで安定した動作を保証します。
3. 軽量・高トルク設計
DAMIAO 4340 モーターは、コンパクトでありながら強力な構成を特徴としており、軽量でありながら高いトルク密度を実現します。
これは、機械的強度と構造効率の両方が求められるロボットアームに最適であり、ヒューマノイドロボットや協働ロボットの開発において重要な要素となります。
4. OpenArmとのシームレスな統合
DAMIAO モーター キットはOpenArmプラットフォームとネイティブに互換性があり、リアルタイムのモーション フィードバック、ジョイント同期、制御アルゴリズムのカスタマイズをサポートします。
モジュール式アーキテクチャにより、研究やプロトタイピングのための組み立て、拡張、システムデバッグが簡単に行えます。
5. プロフェッショナルグレードのパフォーマンス
信頼性と精度を念頭に置いて構築された DAMIAO ジョイント モーター システムは、長期的な学術的および産業的用途に必要なレベルの耐久性を提供します。
ヒューマノイドロボット用

技術構成
右腕
DM-J8009P-2ECモーター×2
DM-J4340P-2ECモーター×1
DM-J4340-2ECモーター×1
DM-J4310-2ECモーター×4
左腕
DM-J8009P-2ECモーター×2
DM-J4340P-2ECモーター×1
DM-J4340-2ECモーター×1
DM-J4310-2ECモーター×4
オープンソースロボットエコシステムの強化
オープンソース ロボット コミュニティが進化を続ける中、DAMIAO ジョイント モーター システムは、次世代ヒューマノイド研究のための堅牢でモジュール式の高性能モーション ソリューションとして際立っています。
機械精度、インテリジェントな駆動制御、オープン プラットフォームの互換性の組み合わせにより、開発者はイノベーションを加速し、アイデアを実際の機能的なロボット システムに変換できます。